 İnce Satırlar
İnce Satırlar Liste Modu
Liste Modu Döşeme Modu
Döşeme Modu Sade Döşeme Modu
Sade Döşeme Modu Blog Modu
Blog Modu Hibrit Modu
Hibrit Modu
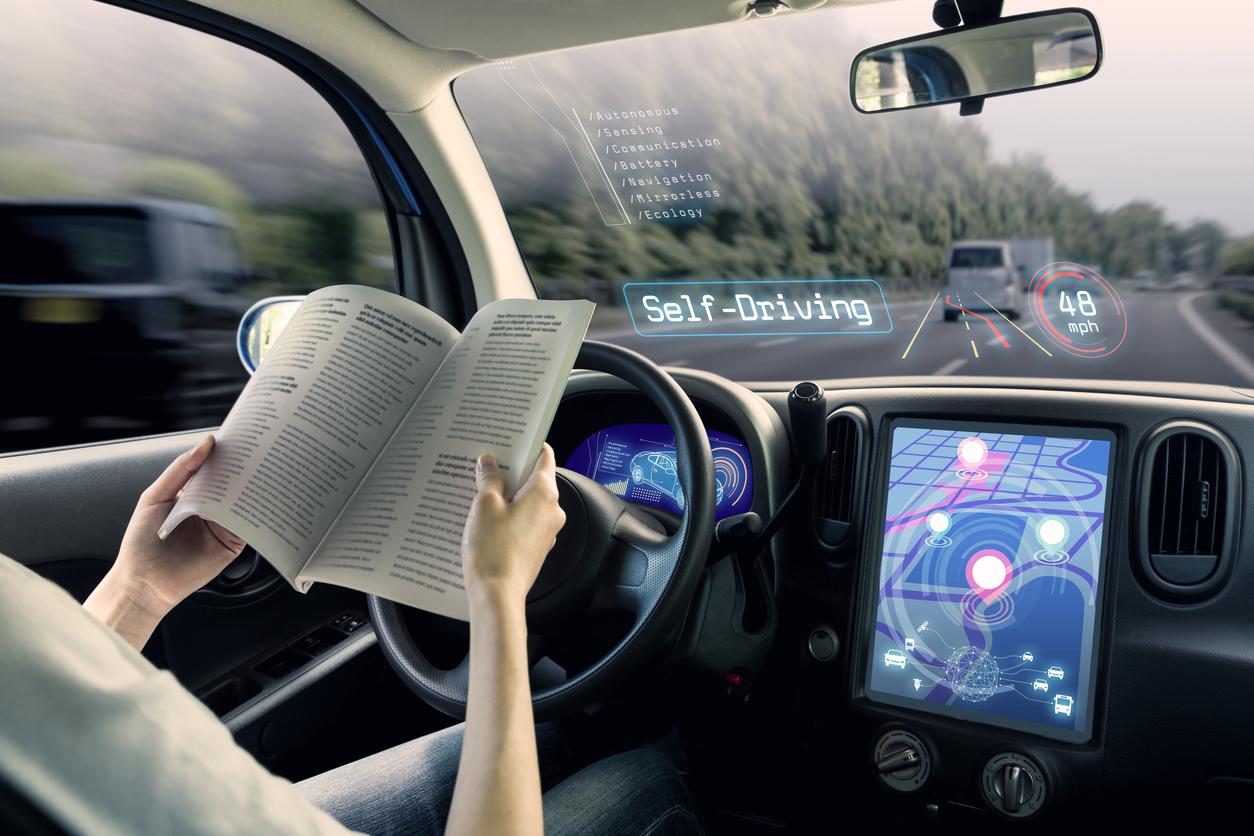
MIT araştırmacıları sürücüsüz araçlar için yeni bir algoritma geliştirdi çünkü şuan kullanılmakta olan şerit değiştirme algoritmalarının yetersiz olduğunu düşünüyorlar. MIT’ye göre çok detaylı istatistiklere dayanan bu algoritma modelleri karmaşık yapısı nedeniyle araçların anında karar vermesini zorlaştırıyor. Bazı algoritmalar ise aracı çok kısıtlı hareket etmeye – şerit değiştirmekten kaçınacak kadar - zorluyor.

Araçlar daha hızlı kara verebilecek
MIT tarafından geliştirilen yeni algoritma ise bu noktada sürücüsüz araçların trafikte daha atik davranabilmesini hedefliyor. Araştırmacılar tarafından belirtilene göre, şimdiki algoritmalara kıyasla çok daha az bilgi kullanacak bu model sayesinde araçlar çok daha hızlı karar alıp uygulamaya koyabilecek. Böylece nüfusun yoğun olduğu şehirlerdeki yoğun trafikle daha kolay başa çıkabilecek.
Yeni algoritma, sürücüsüz araç geliştirmede kullanılan “tampon bölgeler” konseptinin modifiye edilmiş bir versiyonuna dayanıyor. Bu konseptteki söz konusu bölgeler herhangi bir kazadan kaçınmak için sürücüsüz aracın kullanabileceği boşluk miktarını temsil ediyor. MIT’nin belirttiğine göre araçların çoğu bu tampon bölgeleri zamandan tasarruf etmek için önceden hesaplıyor. Ancak bu hesaplamalar önceden yapılmasına rağmen hızlı akan trafikte çok fazla zaman alıyor.
Projenin arkasında Toyota da var
MIT’nin “matematiksel olarak verimli” adını verdiği model ise daha az denklem içeriyor. Bu da hem sürücüsüz araçların sürekli ve hızlı bir şekilde tampon bölge oluşturmasına hem de geliştiricilerin bu araçlara daha geniş yelpazede sürüş stili eklemesine imkan veriyor. MIT, yapılan simülasyon testlerinin başarıyla sonuçlandığını fakat gerçek koşullardaki testlere henüz başlamadıklarını belirtti. Toyota gibi üreticiler tarafından desteklenen bu çalışmayı sürücüsüz araçlarda görmek çok uzun sürmeyecektir.
Bu haberi, mobil uygulamamızı kullanarak indirip,istediğiniz zaman (çevrim dışı bile) okuyabilirsiniz:








Kusura bakmayın, bu bölüm bende migren yaptı. Adblocker kullanıyorsanız filtre: www.donanimhaber.com##.owl-stage
Efsane Türkiye’ye gelse alırım..
Başka reklamınız yokmu yav yıllardır aynı post
O ışık efektleri sadece yanlarda değil üstte de olmalıydı. Böylece tabancayı kullanan, kafasını yana eğmek zorunda kalıp, fıtık olmaz. Aynısını küçükken ışıklı ayakkabımda yaşamıştım oradan biliyorum. Ayakkabıma yan bakmaktan düz yürüyemiyordum. Hava atmaktan ziyade o havayı yaşamayı tercih ederim. 7 de olsam 70 de olsam kararım değişmeyecek.
Kaç aydır güne bu reklamla başlıyorum artık bağımlılık yaptı her gün bir toz alınca günümün anlamı oluyor (!)
zaten 40 saat çalışıyorum
Türkçe dil desteği yok ne kullandıüımızı bilmiyoruz
Mukemmel bir silah acaba ne kadar hızlı atıyor. [resim]
Fiyat makul olsa efsane olur gerçekten ya.
arkadaşlar fc24 gerçekten bedavaya veriliyor kaçırmayıınn
bu reklam daha ne kadar kalacak
30 yıldır bunu görüyoruz
@ccguven sizden daha istilacı olamazlar...
Vay bee, bu cihaz xiaomi çıktı ben de diyordum kim üretmiş..
hocam 4x daha iyi direk hs attirir
Über
Evet ama 6x scop daha iyi gider buna daha uzaktaki hedefler için. Gerektiğinde 3x'e de çekebilirsin falan :D
Muskun alev tabancası vs bu
İstilacı güvercinlere karşı iyi olur. 5 10 dk da bir sopayı alıp kovalamak yordu artık.
Yakında su atan F18 falanda yaparlar :)